News

IROS2022, Big Challenge Forum
- Date&Time: Oct. 26th (Day 3), 14:30 -17:30
- Venue:Main Hall, Kyoto International Conference Center (ICC Kyoto)
- Style: Co-sponsored by JST
OBJECTIVES
With the background of the rapid development of AI technology etc., the development of robot systems that can work in various situations has attracted worldwide attention.This forum aims to bring together these challenging international projects related to such robots for discussion and future international collaboration.
This forum is a continuation of the following Workshop at ICRA2022.
Workshop on “Toward AI-embedded robots in 2050”
PROGRAM
| 14:30-14:45 |
 |
Prof. Toshio Fukuda (Moon Shot Project Director)Title: Introduction of the Moonshot project: Goal 3 |
|---|---|---|
| 14:45-15:00 |
 |
Prof. Tetsuya Ogata (Waseda Univ. from Sugano PJ)Title: Deep Predictive Learning for AI robots that can learn and act alongside humans |
| 15:00-15:15 |
 |
Prof. Takamitsu Matsubara (NARA Institute of Science and Technology from Nagatani PJ)Title: Open design approach to innovative AI and robotic technologies for infrastructure construction and maintenance |
| 15:15-15:30 |
 |
Prof. Tadahiro Taniguchi (Ritsumeikan Univ. from Harada PJ)Title: Expanding the Frontiers of Science by Conducting Scientific Experiments using Artificial Intelligence based on World Models |
| 15:30-15:45 |
 |
Prof. Tetsunari Inamura (NII from Hirata PJ)Title: Integration of physical and cognitive support towards improvement of self-efficacy of assistive robot users |
| 15:45-16:00 | Break | |
| 16:00-16:15 |
 |
Prof. Michael Littman, Brown University, Division Director for Information and Intelligent Systems at the National Science Foundation (NSF)Title: Initiatives in AI & Robotics at the US National Science Foundation (Online) |
| 16:15-16:30 |
 |
Dr. Cécile Huet, Head of Unit Robotics & Artificial Intelligence Innovation and Excellence– A1, European CommissionTitle: EU Programme addressing Big Challenges in Robotics (Online) |
| 16:30-17:30 | Closing | Wrapping & Tour of Robot Exhibition (Booth No. 36) |
Real robot demonstration by Four Moon Shot Projects
Oct. 24-26 9:00-17:00
AIREC robot (from Sugano PJ)Booth No. 36-1 |
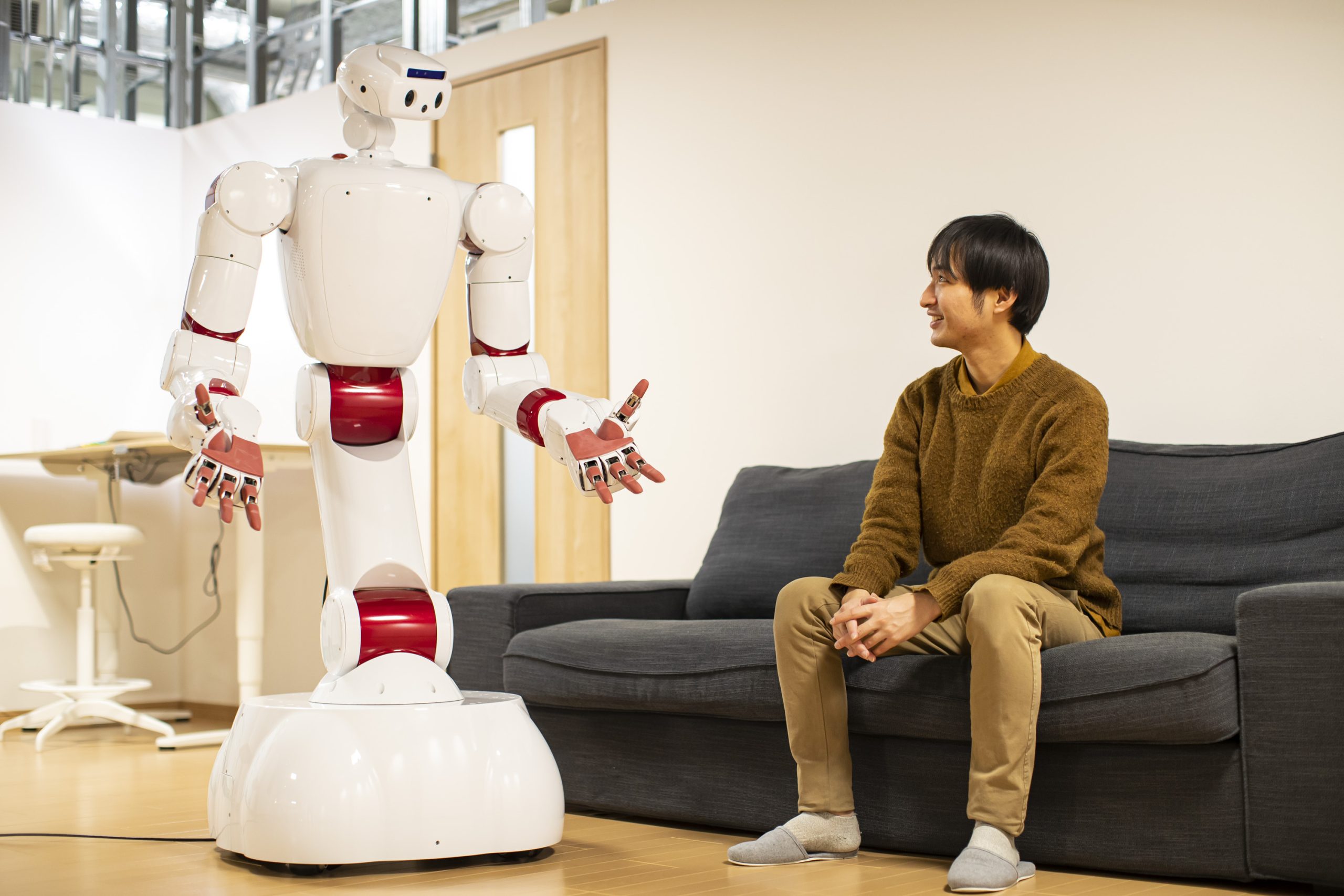 |
This project aims to establish robot evolution technology that combines flexible machine hardware and unique AI that can understand many kinds of tasks. We will show the demonstration of the prototype of the AIREC (AIREC AI-driven Robot for Embrace and Care). |
|---|---|---|
i-Centipot-Hose (from Nagatani PJ)Booth No. 36-2 |
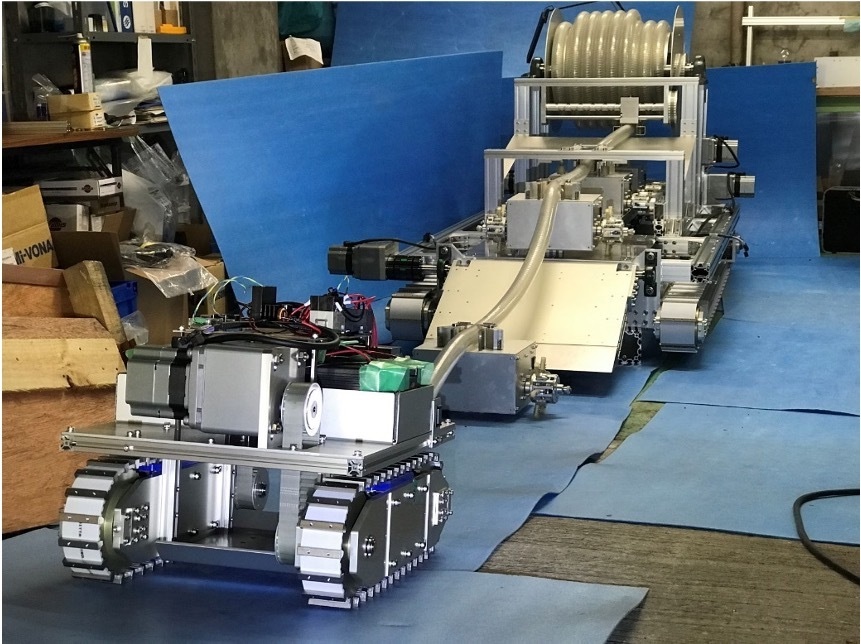 |
This project aims to develop a machine that can flexibly adapt to an uneven environment based on the concept of implicit control. To evaluate the concept, we are now developing a robotic pumping system, “i-CentiPot-Hose,” which adapts to natural disasters, such as a river channel blockage. We will demonstrate the motion of its deployment of the hose. |
AI-robot scientists -platform- (from Harada PJ)Booth No. 36-3 |
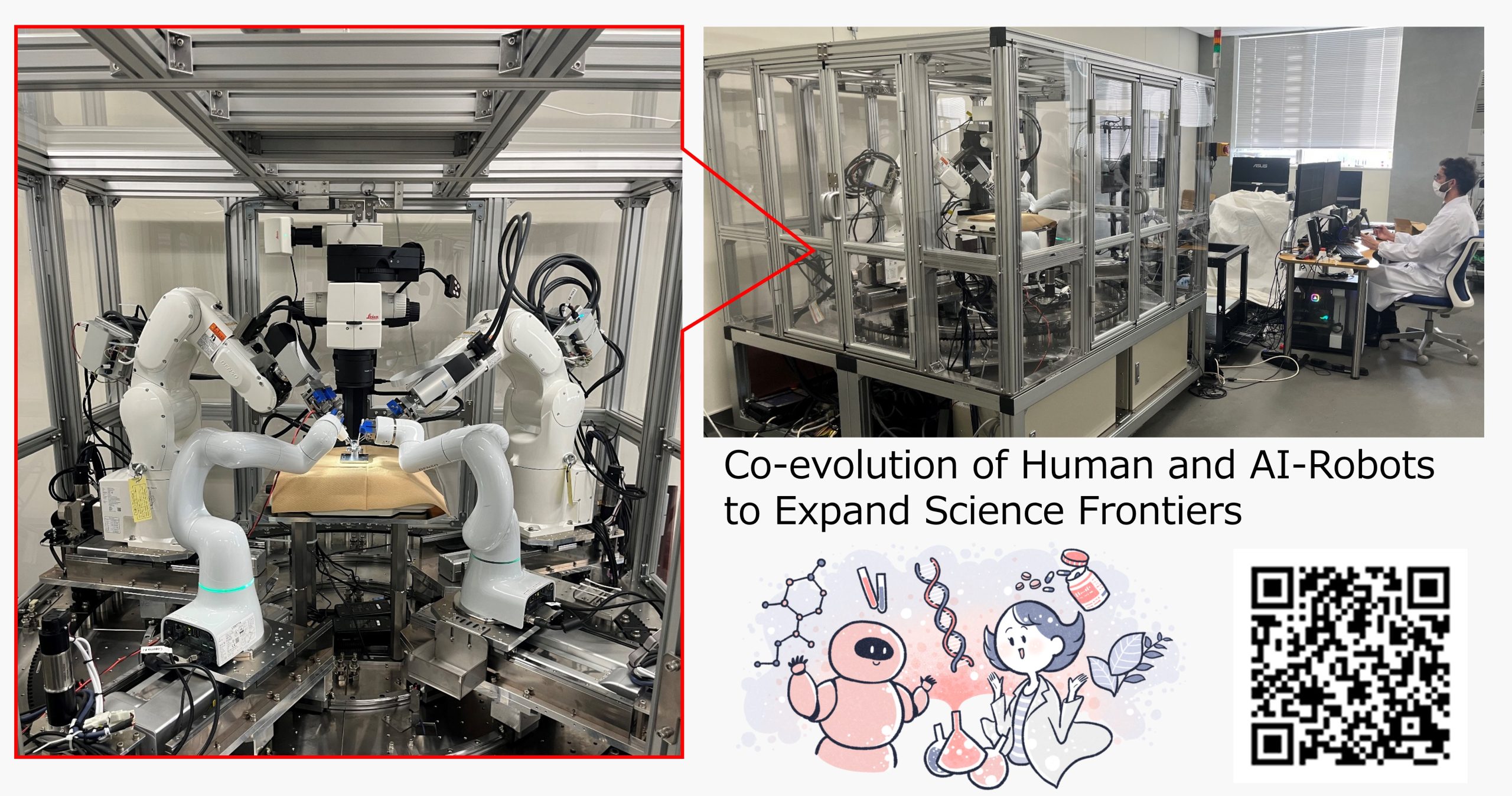 |
The project aims to develop AI-Robot Scientists to assist with the complex manipulation required in scientific experiments. The first prototype of the AI-robot platform for scientific discovery will be used to demonstrate dexterous and precise manipulation. The robot in Tokyo will be teleoperated using the input devices at the conference site in Kyoto. |
Robotic Nimbus (from Hirata PJ)Booth No. 36-4 |
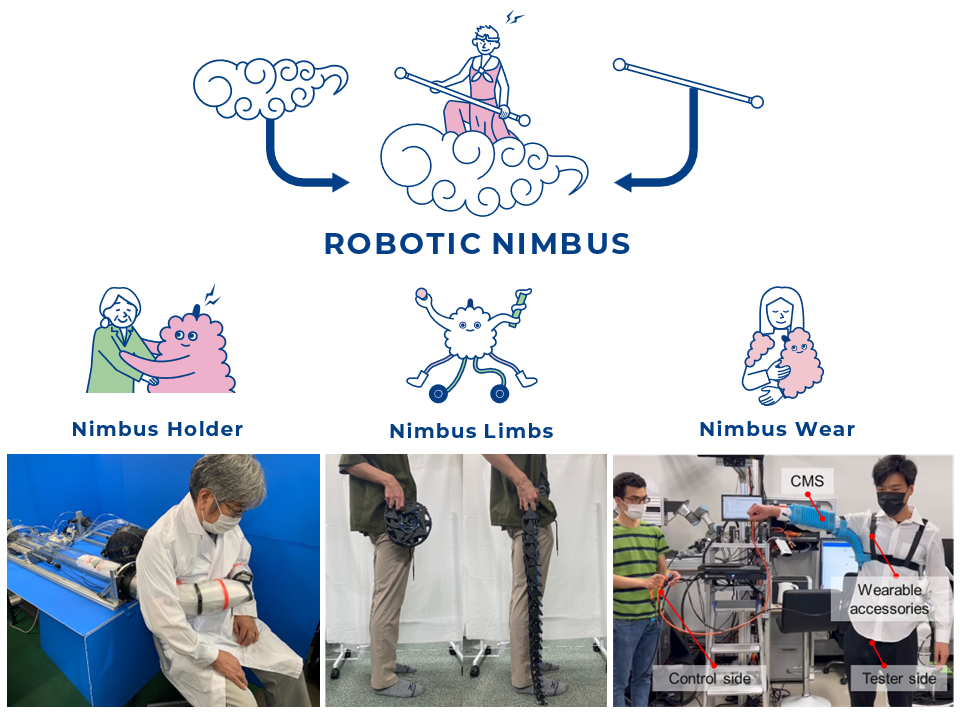 |
The project aims to develop a collective of adaptable AI-enabled robots called Robotic Nimbus. Each robot will be usable by anyone at any time and will adjust its form and functions according to the individual user to provide optimal assistance and services. We will show the demonstration of several prototypes of Robotic Nimbus, Nimbus Holder, Nimbus Limbs, and Nimbus Wear. |